chip-tutorials
Running an example design
This assumes that the smoke test runs and you’ve installed OpenLane properly.
There is also a very good overview for Newcomers.
You can run an example design called “SPM” by running:
openlane --run-tag foo --run-example spm
which will download the design, all technology files, and completely implement the design. Once done, all of the files are in the “spm” subdirectory. The run logs and outputs of the tools are in a directory with the current date and time like “spm/runs/RUN_2024-12-12_11-58-38”.
Once you’ve run once, you can enter the directory and see the files:
- config.yaml: The configuration of the design.
- src: The directory with the Verilog source files.
- run: The directory containing all runs, one per directory.
- verify: The verification directory with Verilog test benches.
If you want to run again, you can specify the config file as an argument to OpenLane:
cd spm
openlane config.yaml
Run directories and tags
If you want to to specify a run name like “foo”, you can add the “–run-tag foo” to a command. This will put everything in “spm/runs/foo”, but if you run again, you will either need to remove that directory to start over, or specify “–overwrite” on the command line:
openlane --run-tag foo config.yaml
openlane --run-tag foo --overwrite config.yaml
Viewing the final design
The –last-run option is also a shortcut for the last run directory. To view the last design in the OpenROAD GUI, you can run:
openlane --flow OpenInOpenROAD --last-run config.yaml
and you should see the following:
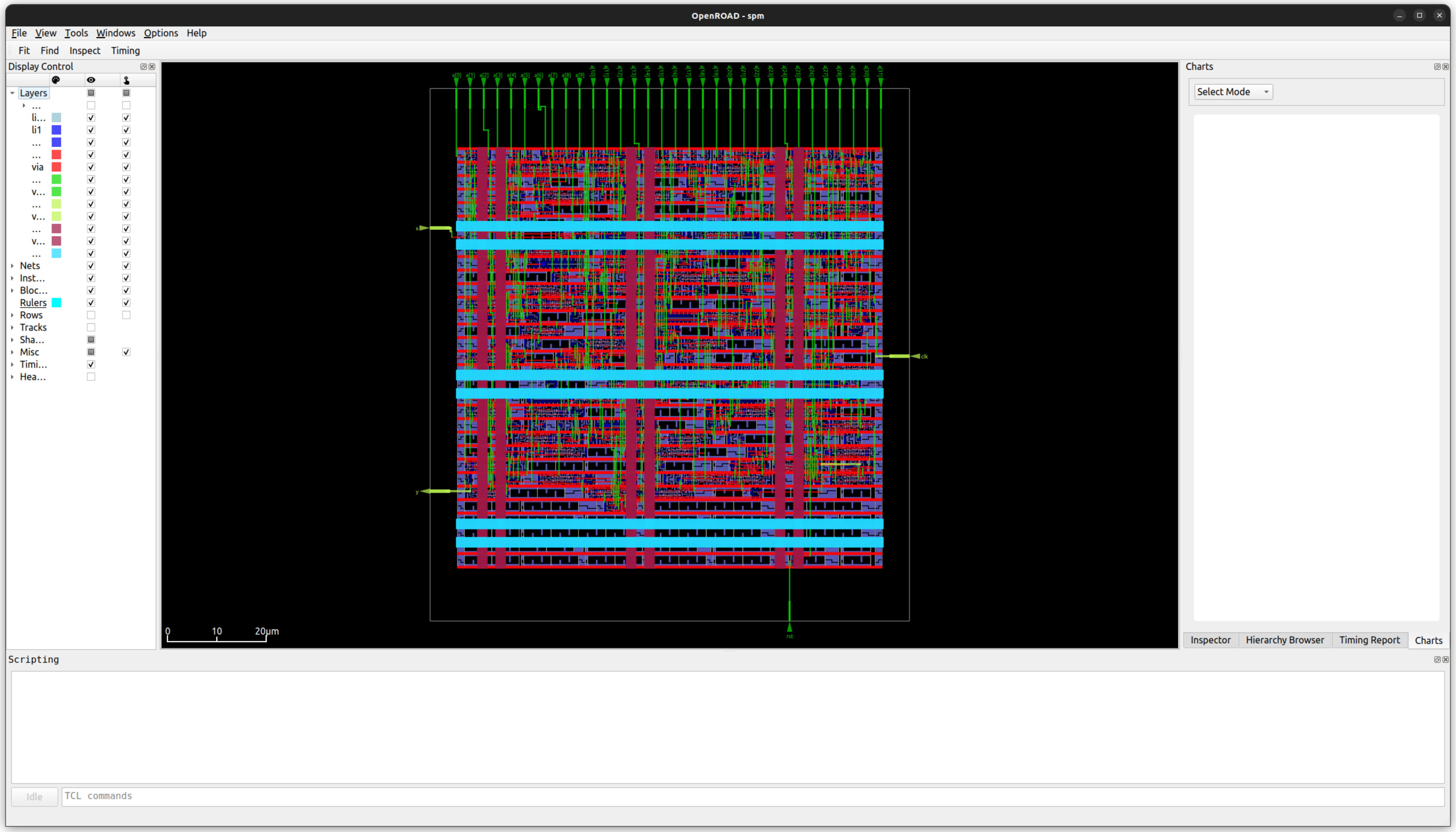 However, this doesn’t load any of the timing or constraint information.
However, this doesn’t load any of the timing or constraint information.
We recommend that, instead, you use:
openroad -gui
and then load the design files manually. You will need to select which ODB (or DEF) file that you want to load based on which stage of the design you want to examine. For example, you can load the final stage, like this:
read_lib $env(PDK_ROOT)/sky130A/libs.ref/sky130_fd_sc_hd/lib/sky130_fd_sc_hd__ss_100C_1v60.lib
read_db odb/spm.odb
read_spef spef/max/spm.max.spef
read_sdc sdc/spm.sdc
where the odb, spef, and sdc file can be found in the final run directory. The .lib file is from your PDK directory.
You can add this to a TCL file and source the script like this:
source myscript.tcl
so that you don’t have to type it over and over again.
You should also go through the Newcomers Guide to OpenLane2.
Help
OpenROAD (not OpenLANE) has some options for help via the man command like most
Unix systems. These manual pages provide detailed information about how to use
a particular command or function, along with its syntax and options.
This can be used for a range of commands in different levels as follows:
- Level 1: Top-level openroad command (e.g.
man openroad) - Level 2: Individual module/TCL commands (e.g.
man clock_tree_synthesis) - Level 3: Info, error, warning messages (e.g.
man CTS-0001)
The OpenLane2 documentation is also available at ReadTheDocs.
The OpenROAD documentation is available at ReadTheDocs.
License
Copyright 2024 VLSI-DA (see LICENSE for use)